Изменена функция работы с однобункерными корабликами. При указании в настройках количества бункеров 1, при всех операциях с бункерами используются оба серво выхода автопилота. Это сделано для совместимости с корабликами у которых первый бункер подключен в гнездо второго. Если у вас однобункерный кораблик с зацепом, то указывайте в панели два бункера;
Реализована функция медленного просыпания прикормки для однобункерных корабликов в режиме автопилота. Кораблик, прибыв на точку, начинает медленно открывать бункер, стоит три секунды, потом начинает разворачиваться и едет на следующий пункт, в то время как бункер открывается. Фактически, просыпание основной части прикормки происходит на обратном пути. Открытие бункера продолжается 10 секунд. (функция пока не протестирована на воде);
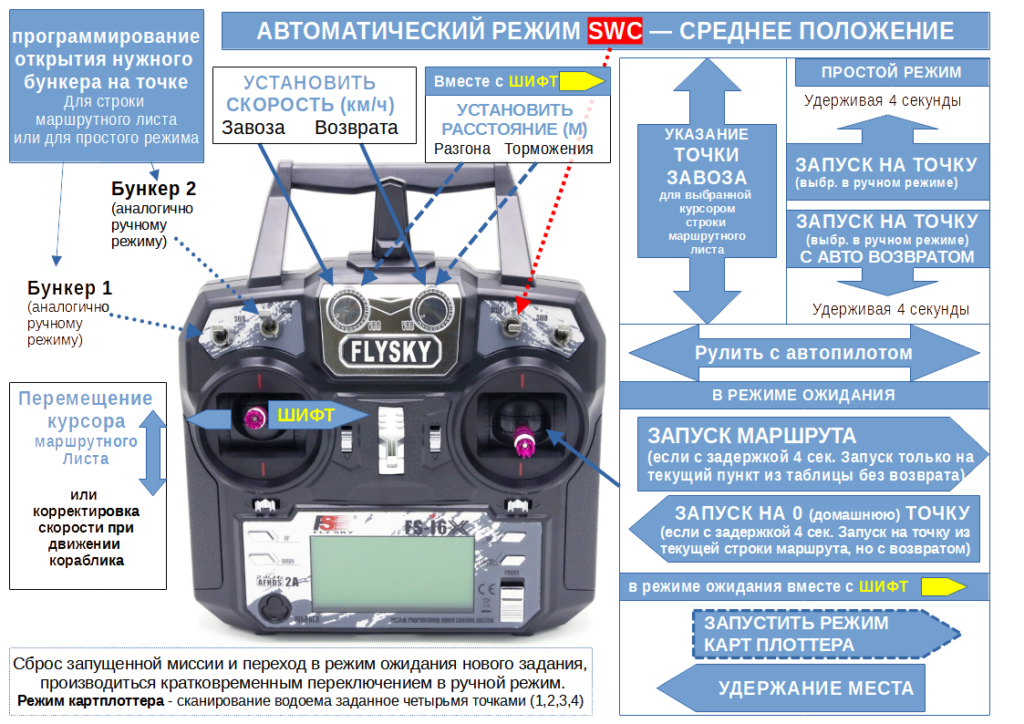
Реализована смена схемы управления пультом. Теперь пользователь автопилота сможет сам выбрать себе удобную схему управления корабликом для пульта. Новые интерфейсы, исходя из пожеланий наших клиентов, мы планируем добавлять и совершенствовать со временем. Выбрать схему пульта очень просто — через WEB панель управления автопилотом. В данный момент работают две схемы. Та, которая была до сегодняшнего дня, называется «Версия-1 (старая)» и новая, под названием «Версия-2 (новая)«. Обновления управления в новой версии коснулись только режима автопилота;
См. схему на картинке ниже (функционал новой схемы управления пока не протестирован на воде)
В данной схеме управления реализована функция картплоттера для использования эхолотов оснащенных GPS приемником и функцией построения карт. Кораблик может сам сканировать водоём, исходя из углов прямоугольной области на водоеме. Вы можете положить мобильный телефон с запущенным приложением для эхолота внутрь кораблика для сбора полученной информации. Координаты четырех углов области берутся из точек текущего места рыбалки 1,2,3 и 4.