
История разработки автопилота UNIBOAT.
Разработка автопилота была начата в мае 2021 года. Планировалось сделать автопилот обладающий только полезными функциями.
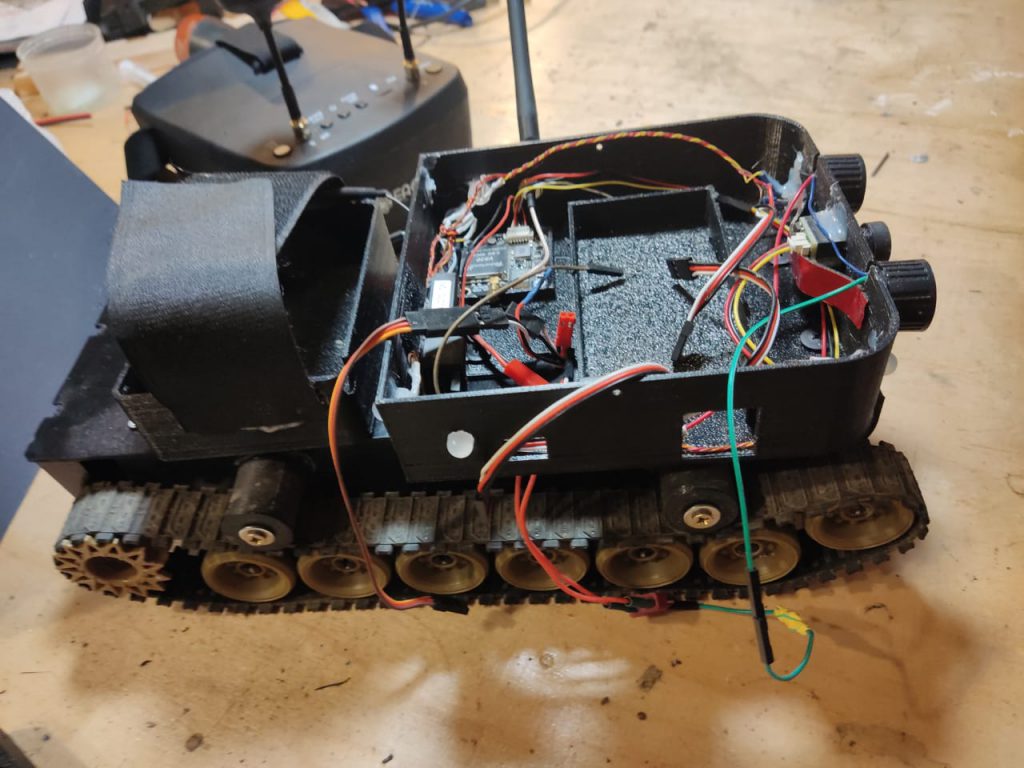
Работа была начата. Мы примерно представляли что должно получиться, но некоторые функции были добавлены уже походу. На первом этапе, работы шли вовсе не на корабле, а на гусеничной платформе, специально собранной с целью научить автопилот двигаться в правильных направлениях, плавно разворачиваться не промахиваясь. Калибровки, уплывания показаний датчиков, безуспешные попытки защититься от электромагнитных помех (и как следствие применение эффективных математических фильтров и немного другой аппаратной начинки) заняли время, но это время было потрачено не зря.

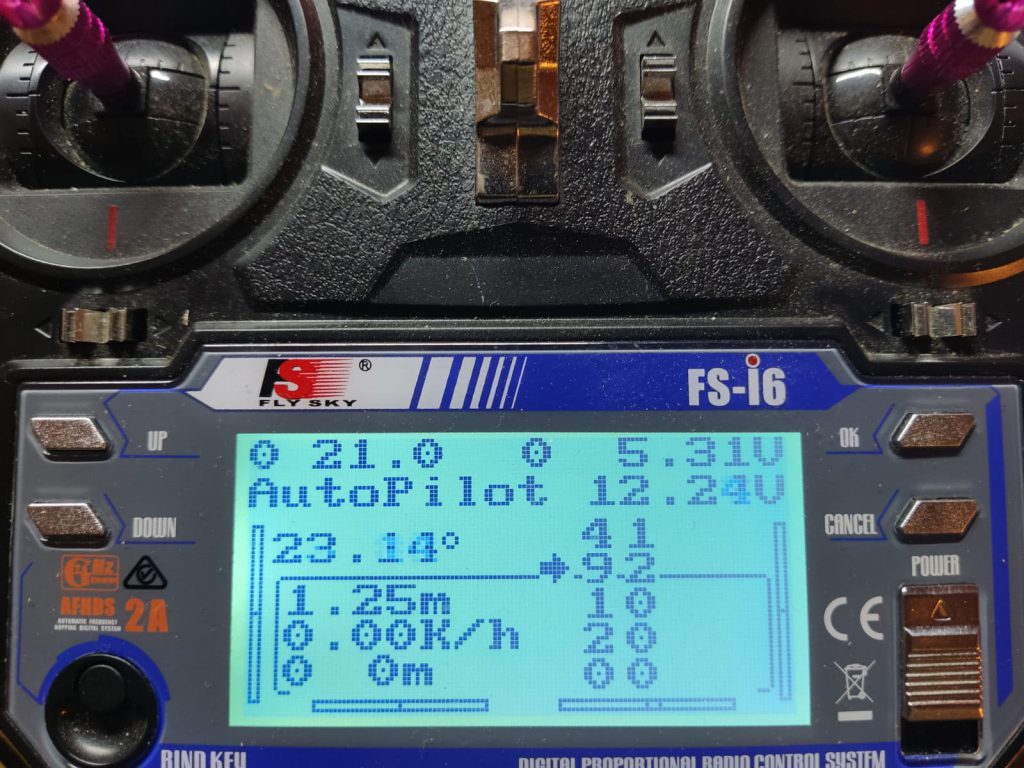
По ходу работ мы столкнулись с ограничением по каналам в пульте FLYSKY. Хотелось отображать таблицу маршрута, так как щелкать тумблерами и в памяти запоминать что ты нащелкал, как -то не серьезно. Несколько дней ушло на модификацию прошивки пульта для поддержки 100 цифровых каналов. Теперь не было проблемы передать и отобразить на пульте любые данные в любом разумном количестве.
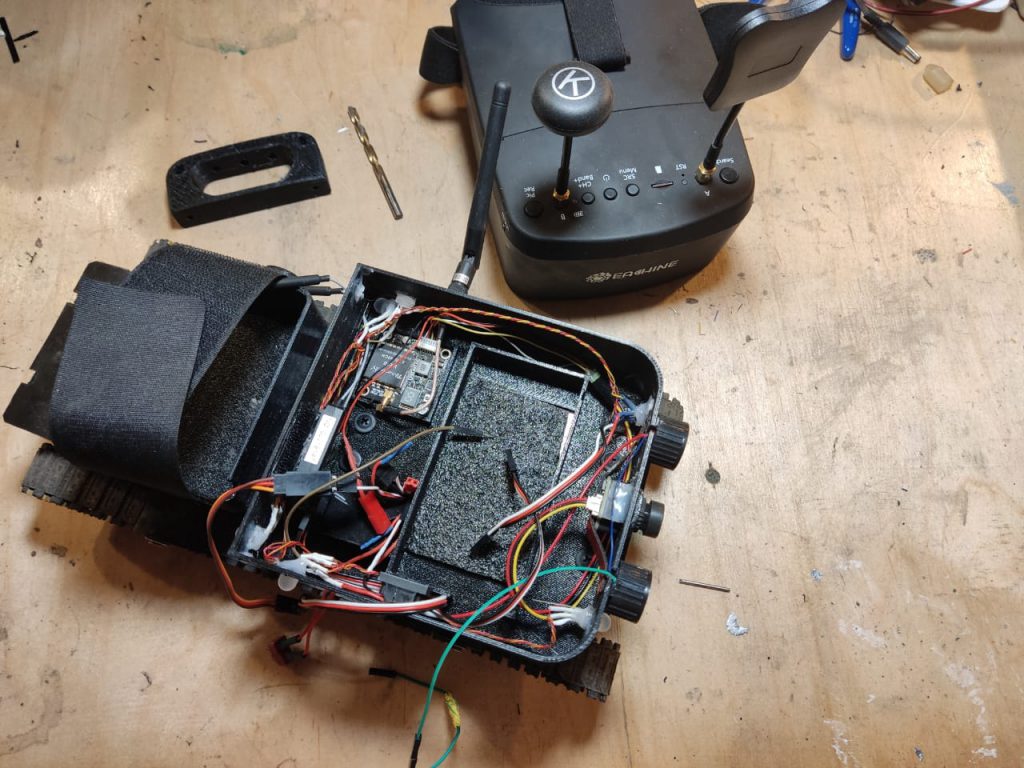
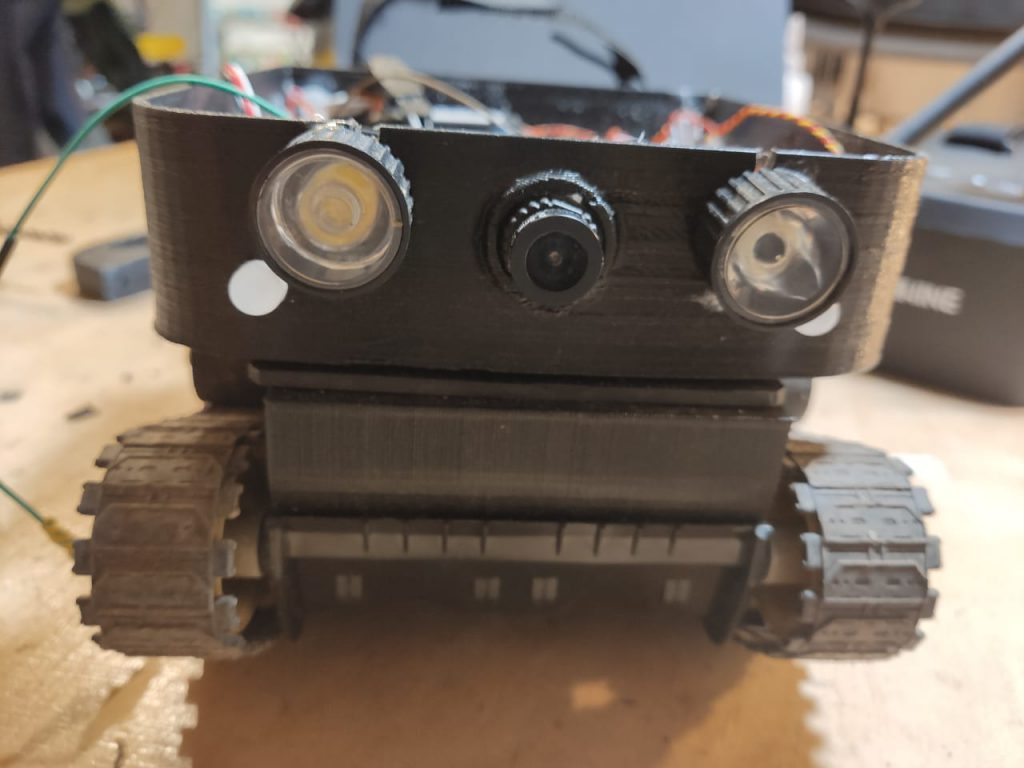
В августе было понятно что пришло время снимать автопилот с гусеничной платформы, которая, к тому времени получила кличку «Танк» и обросла видеокамерой с дальнобойным передатчиком, двумя фарами и яркими светодиодами. Оказалось, что ночью работать проще, так как аппарат, который к тому времени умел сам достаточно далеко уезжать на задания катаясь по точкам, начал привлекать очень много внимания прохожих и водителей.
На заключительном этапе разработки автопилота UNIBOAT назрела необходимость испытаний на воде, а значит и установку автопилота на реальный кораблик. Нужен был кораблик, на котором можно было посмотреть поведение автопилота и на маленькой и на большой скорости и больших вибрациях. В общем, чем хуже условия испытаний тем лучше. Именно большие скорости и есть настоящий экзамен на адекватность и своевременность реакции кода зашитого в электронику.
Свой кораблик сделать? Занятие очень кропотливое и долгое, а отвлекаться очень не хотелось. Оставили это на потом, а пока оставалось только покупать или как то договариваться. Было пересмотрено много ни чем не примечательных моделей на авито, пока не увидели на видео очень красивый, мощный кораблик, небольших размеров, летающий над водой на огромной скорости. Выбор был сделан. Теперь мы использовали корпус и обвес любезно предоставленного нам кораблика SEDNA LUX от кампании MICROBOAT. Именно этот кораблик мы выбрали по нескольким причинам.
Первая — компактный размер удобен при частых тестах и поездках на легковой машине. Маленькие кораблики более капризны на воде в волнам и ветру, а нам по любому тестировать правильность поворотов при качке.
Вторая и пожалуй самая главная причина — высокая скорость и неплохая маневренность. Разворот при старте на 180 градусов на 40 сантиметрах — неплохо. Эти характеристики позволят нам увидеть и учесть много нюансов поведения кораблика на воде при программировании автопилота. Мы должны были видеть как будет вести себя автопилот на высоких скоростях, будет ли он успевать тормозить, безопасно разворачиваться на 25 кмч и многое другое. Благодаря такому кораблику с «характером» было учтено и добавлено много параметров в настройки. Какраз небольшой занос вправо на этой модели от закручивания винтом на максимальных оборотах навеял мысль о создании круиз контроля, который будет сам вести кораблик по прямой в ручном режиме без необходимости триммирования руля. Позднее мы оценили эту функцию и на малой скорости, когда тестировали WIFI эхолот «лаки» прикрепленный к носу корабля в поисках рыбы. От ударов воды по эхолоту кораблик постянно отбрасывало в разные стороны, но круиз стабильно подруливал и вел кораблик по прямой. Кораблик успешно отработал около сотни зарядов и разрядов АКБ пока интенсивная часть испытаний не была закончена. Огромное спасибо нашему кораблику MICROBOAT SEDNA LUX достойно вынесшему все издевательства. Но сейчас пришло время классики и мы ищем где купить нибудь неповоротливый двухмоторник, типа карпбота, для испытаний нашего автопилота на нем. Хотя в теории он должен плавать хорошо, так как с него все и начиналось, ведь двухмоторный гусеничный «Танк», это по сути тоже самое, а скорости там нет…. вообще :).
Впереди еще много работы. Доделать функцию поиска рыбы, закончить приложение с картами, пока в автопилоте только половина от всего что хотелось бы сделать.