
Управление корабликом в режиме автопилота
Программирование миссии
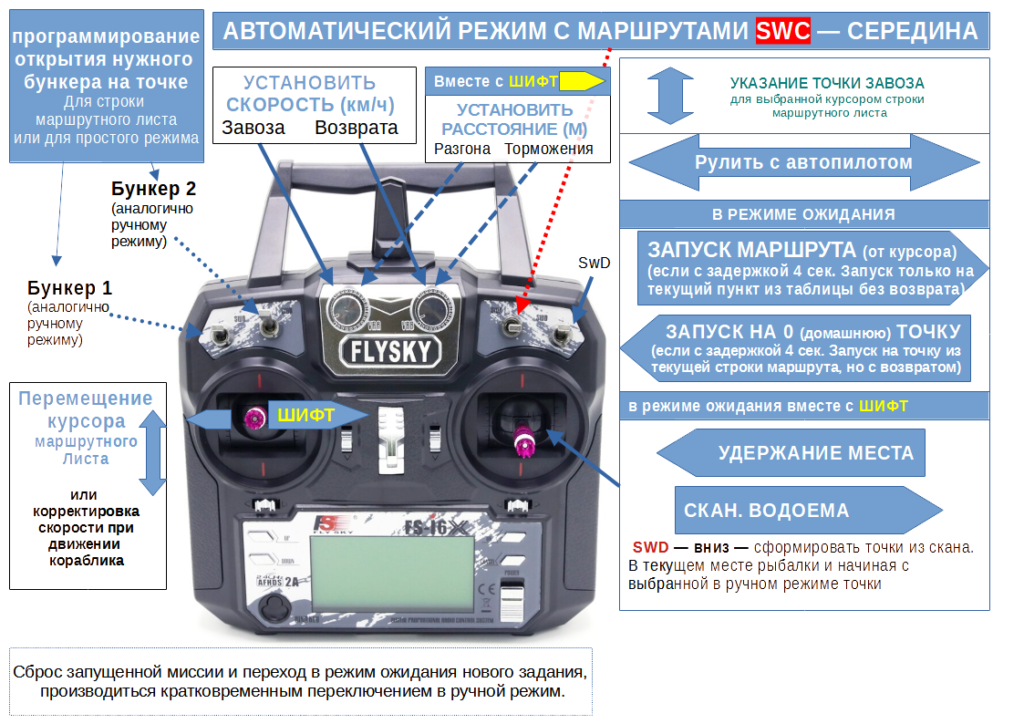
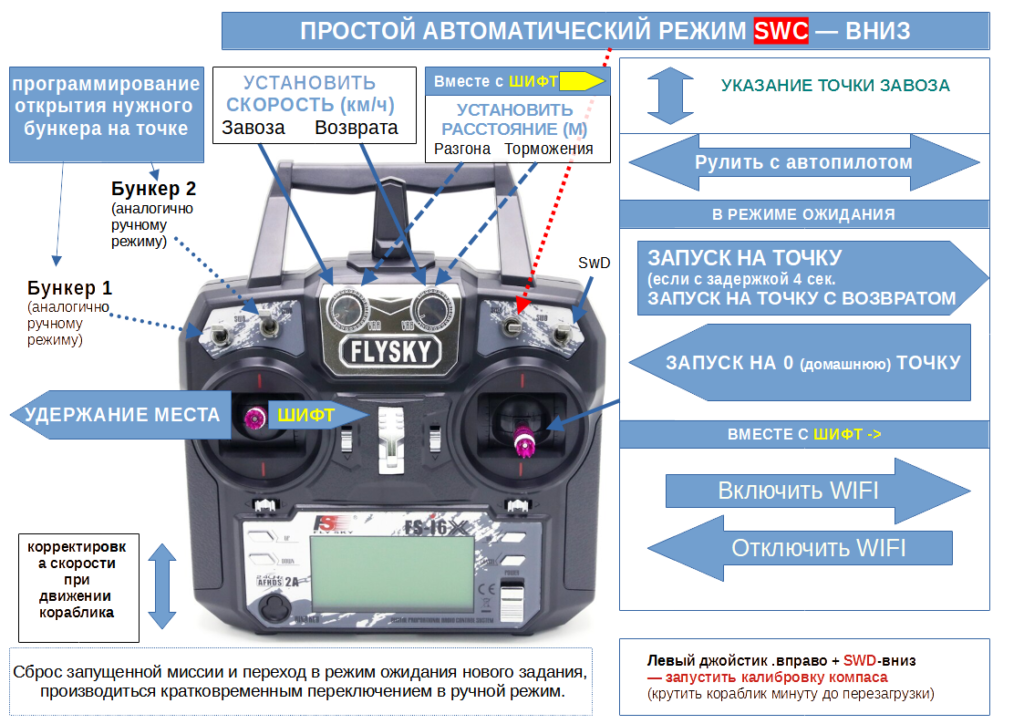
Переключение в режим автопилота производится установкой тумблера SWC в среднее положение. Там где была информация о глубине рыбы появится таблица из пяти строчек. Первоначально в ней только нули.
Миссия на которую планируется кораблик программируется заполнением этих строчек информацией. Первое число каждой строки это номер точки на которую должен пойти кораблик, а второе число обозначает каике бункеры надо открыть по приходу на эту точку.
Для перемещения между строками используйте вертикальные наклоны левого джойстика. Выбранная строчка таблицы будет обозначена стрелочкой.
Изменение номера точки в выбранной строке происходит точно так же как в ручном режиме. То есть наклоняя правый джойстик в верх или вниз вы изменяете номер точки в первом столбце. Точка задана. Осталось задать номер бункера во втором столбце. Просто щелкаем вниз тумблера SWA (для первого бункера) и SWC (для второго) и во втором столбце увидим 1 — первый бункер, 2 — второй бункер или 12 — первый и второй бункер.
На одно бункерных корабликах нет смысла задавать сброс более одного бункера, поэтому остальные точки можно использовать как точки обхода в случае необходимости. Если в строке не указан сброс бункера (0-второе значение), то, указанная в первом столбце точка считается точкой обхода. На точке обхода не производится торможение, только замедление в два раза от заданной при повороте. Скорость на точку обхода автоматически устанавливается как на точку возврата (вторая крутилка). Если после точки обхода по списку есть пункты для сброса бункеров то используется скорость ЗАВОЗА. В противном случае будет использована скорость ВОЗВРАТА.
Если в таблице идут несколько строк подряд с одинаковым номером точки, то они игнорируются.
Отправка кораблика на миссию (задание)
После программирования миссии самое время отправить кораблик на созданное задание. Кратковременно отклонив левый джойстик влево вы отправите кораблик на выполнение миссии начиная с первого пункта. Отклонив левый джойстик вправо можно отправить кораблик только на выбранный курсором пункт миссии.
Быстрый возврат на домашнюю точку
Отклонив правый джойстик вправо вы отправите кораблик на нулевую точку минуя. Внимание, если миссия находится в стадии выполнения, но вам необходимое ее прервать переключением на ручной режим и обратно.
Задаем скорость завоза и скорость возврата
Если вы находитесь в режиме автопилота, то задать скорость завоза прикормки можно крутилкой VRA, а скорость возврата или обхода точек крутилкой VRB. Во время поворота крутилок измененная скорость кратковременно видна, там где обычно отображается скорость кораблика (в км/ч ВТОРАЯ СТРОЧКА СНИЗУ).
Удержание точки в произвольном месте
Иногда возникает необходимость покинуть место рыбалки не извлекая кораблик из воды. В это время хочется быть уверенным, что кораблик останется на том же месте и его не унесет ветром или течением. Для этого нами реализовано режим удержания точки. Если кратковременно отклонить правый джойстик влево, то кораблик запомнить тукающую GPS координату и будет стараться не выходить за пределы точки удержания (2 метра по умолчанию) в настройках можно менять этот радиус по вашему усмотрению. Чем дальше кораблик отнесло от точки тем интенсивнее он крутит двигателями чтобы занять положение в ее центре.
Регулировка расстояний разгона и торможения перед точкой назначения
Автопилот поддерживает режим плавного разгона и торможения пред точкой. Плавный разгон позволяет кораблику аккуратно развернуться и поехать на точку достигая заданной скорости завоза или возврата (если он идет домой или на точку обхода). Плавное торможение позволяет точно и тихо прийти на точку и сбросить прикормку. Чем больше путь торможения тем точнее будет завоз на заданную точку. Для того чтобы изменить расстояние завоза отклоните левый джойстик вверх и поворачивайте крутилку VRA. Выбирайте расстояние завоза и оно будет отображаться на экране пульта кратковременно в месте расстояния (в м). Аналогично, но только крутилкой VRB можно указать скорость торможения.
Прерывание текущей миссии
Чтобы прервать миссию достаточно кратковременно переключиться в ручной режим